



Nata nel 2004 come System Integrator, oggi Eureka System si dedica allo sviluppo di soluzioni di automazione su misura.
Anni di sviluppo di software industriale e di progetti di automazione e robotica, ci hanno portato ad acquisire competenze tecniche specifiche in molti ambiti e tecnologie, così da poter ideare sviluppare e integrare soluzioni su misura destinate ai più diversi processi produttivi.

In Eureka System sviluppiamo soluzioni su misura che nascono sempre dal software e comprendono spesso anche il design, la meccanica, e l’elettronica.
Dall’analisi tecnica, allo sviluppo software, alla messa in servizio dell’automazione: ogni progetto viene seguito con un metodo di lavoro ben consolidato.
Software e soluzioni personalizzate, affidabili e innovative, sviluppate su misura con un metodo di lavoro ben consolidato.
Scopri tutte le potenzialità dei nostri software:

La nostra storia è la nostra esperienza, costruita negli anni sviluppando progetti di automazione per i più diversi settori industriali.
Nel corso degli anni, Eureka System ha ampliato la propria offerta in termini di soluzioni, servizi, e tecnologie utilizzate e integrate. Questo ci ha permesso di sviluppare internamente una vasta esperienza settoriale e multidisciplinare.

Espressione concreta delle competenze tecniche di Eureka System, AgiLAB è allo stesso tempo una showroom e un laboratorio interattivo robocentrico dedicato allo Smart Manufacturing.
Sviluppata per emulare in modo agile un processo produttivo ottimizzato in ottica 4.0, AgiLAB dimostra concretamente il ruolo del software nell’innovazione di processo.
Il cliente finale di questo progetto è Europoliuretani Srl, una storica azienda italiana in grado di proporre una vasta gamma di prodotti e macchine per la schiumatura del poliuretano espanso e per l’applicazione di colla e di guarnizioni poliuretaniche, fornendo al cliente anche i prodotti chimici.
Con oltre 35 anni di esperienza nel settore del poliuretano, l’azienda si contraddistingue per la capacità di studiare, per i clienti, sistemi su misura all’avanguardia. Europoliuretani mira a essere un’azienda di riferimento nel mondo del poliuretano, producendo sia la tecnologia di dosaggio sia il prodotto chimico e offrendo assistenza tecnica. Un servizio non solo completo, ma anche su misura in base al tipo di applicazione di ogni cliente e alle sue necessità, mantenendo sempre elevate la cura del dettaglio e la passione per il loro lavoro, garanzia di successo. È questa forza che ha permesso all’azienda di esportare i propri prodotti a livello europeo e mondiale.
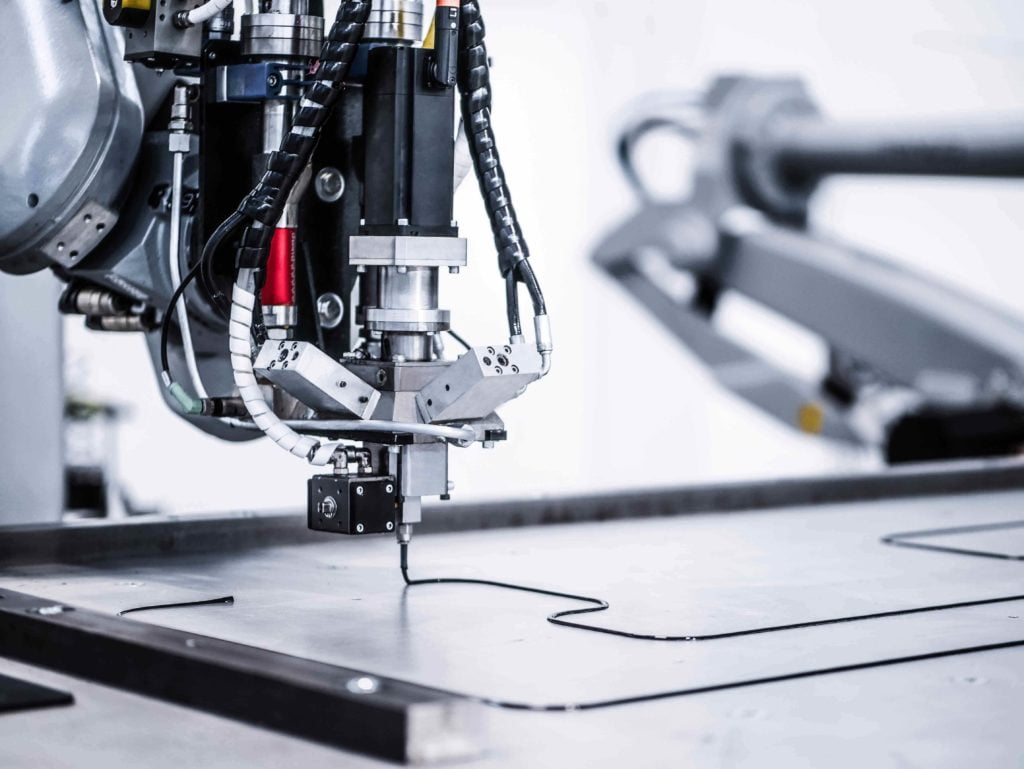
Europoliuretani ha scelto Eureka System per sviluppare un software innovativo per il sistema di miscelazione, erogazione e applicazione robotizzata della schiuma poliuretanica per guarnizioni. Grazie a questa soluzione, dei robot antropomorfi avrebbero dovuto essere integrati nelle macchine dosatrici GASKET LP per la stesura di guarnizioni in poliuretano. I robot avrebbero dovuto stendere le guarnizioni adattando dinamicamente i percorsi di erogazione in base alle specifiche di ciascun ordine, senza dover riscrivere le movimentazioni robotiche a ogni cambio di ricetta. Ciò per consentire la produzione di lotti unici di pezzi custom, garantendo efficienza, flessibilità e interconnessione del parco macchine.
La soluzione sviluppata da Eureka System è un sistema di miscelazione, erogazione e applicazione robotizzata di schiuma poliuretanica per guarnizioni che comprende sia software sia robotica. Infatti, la soluzione CAM-robot consente a un antropomorfo di effettuare lavorazioni CNC dinamiche seguendo traiettorie complesse e, volta per volta, sconosciute, programmando automaticamente le movimentazioni del braccio antropomorfo a partire da semplici disegni DXF dei pezzi su cui applicare la guarnizione.
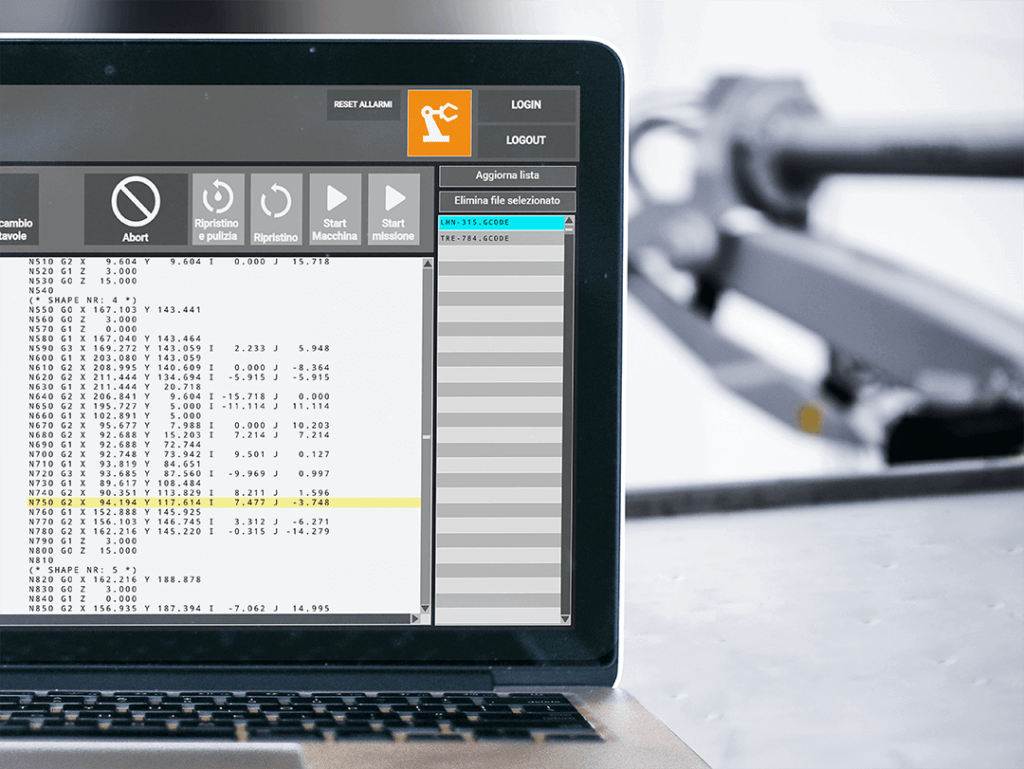
Il robot antropomorfo può essere utilizzato per eseguire lavorazioni CNC grazie all‘interfacciamento con ROSETTA, un software di interpretazione del G-code sviluppato da Eureka System. Il software genera i toolpaths ad alta precisione che il robot seguirà per lavorare i pezzi, consentendo un controllo immediato e user-friendly da parte dell’operatore sul campo. L’elaborazione del percorso robotico avviene secondo questi passaggi:
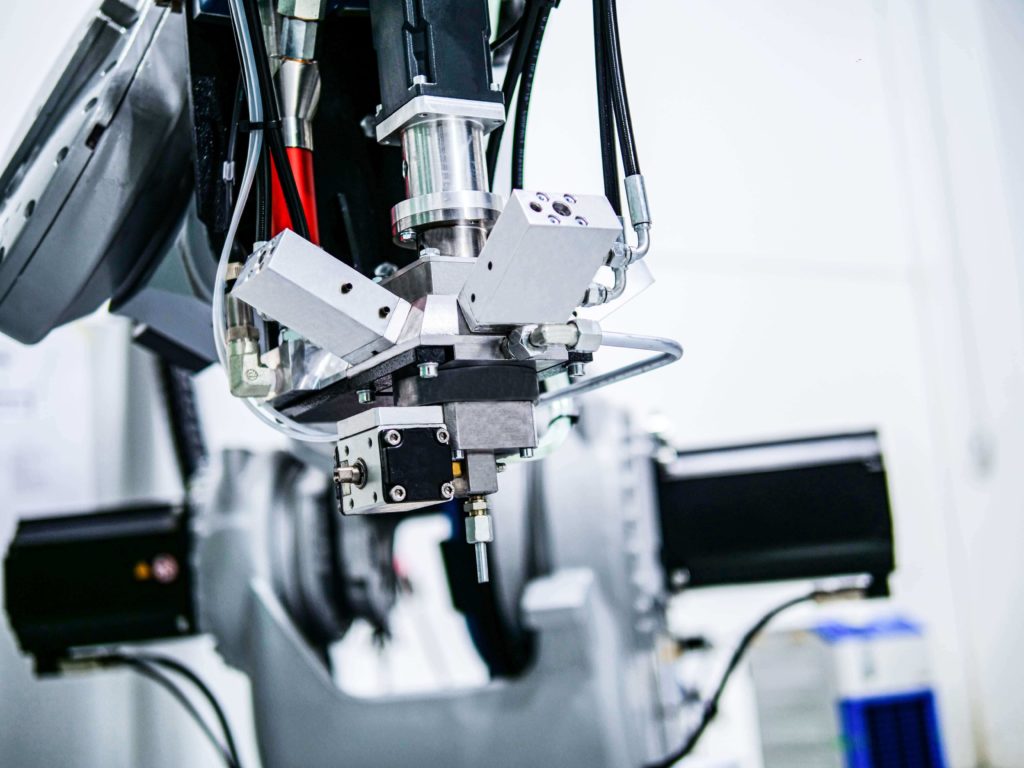
Dal punto di vista dell’hardware, Eureka System ha creato una soluzione robotica avanzata che combina l’affidabilità dei bracci robotici Comau con le potenzialità dei controllori Keba, offrendo un processo di automazione complesso e altamente personalizzabile. Grazie all’interfaccia software intuitiva e alla capacità di gestire diversi tipi di lavorazione, questa soluzione si adatta alle esigenze specifiche della produzione, garantendo risultati precisi e affidabili.
Il modello antropomorfo utilizzato per questa applicazione è un robot Comau a 6 assi, modello Smart 5 NJ-110-3.0, che offre una capacità di carico di 110 kg, una ripetibilità di 0,07 mm e uno sbraccio orizzontale di 2980 mm; un controllore Keba gestisce i controlli di sicurezza, i movimenti e la logica del robot.
La soluzione sviluppata è adatta a lavorare su elementi plastici o metallici di dimensioni variabili e di forma piana, come rettangoli o cerchi. I percorsi di applicazione della guarnizione sono definiti tramite sequenze di istruzioni G-code importate da file CAD in formato .dxf. L’interfaccia software per l’operatore è molto semplice e intuitiva e consente anche di indicare graficamente i punti di inizio e fine dell’erogazione della guarnizione, di imputare la distanza costante tra il tool di erogazione e il pezzo, le velocità di lavorazione incluse accelerazione e decelerazione, e i punti di riposo, pulizia e pre-colata della testa erogatrice.
Per garantire flessibilità e facilità d’uso, i percorsi di applicazione possono essere scritti, modificati, archiviati, cancellati e richiamati con facilità. Questo assicura al sistema un elevato livello di adattabilità e usabilità, consentendo un’efficace gestione delle operazioni di automazione.

Grazie alla soluzione CAM-robot, i tempi di setup del GASKET LP tra un pezzo da lavorare e il successivo si sono ridotti in modo significativo: l’azienda è in grado di proporre agli utilizzatori finali un sistema robotico flessibile e dinamico, capace di adattarsi con facilità a nuove configurazioni di percorso e di lavorazione. Non è più necessario scrivere i percorsi robotici manualmente o volta per volta pre-impostare e fare il setup di una macchina CNC per eseguire le lavorazioni: utilizzando il CAM-robot è sufficiente importare il file .dfx relativo al pezzo che si sta per mandare in lavorazione e in pochi passaggi il robot eseguirà il nuovo percorso di erogazione della guarnizione.
Questa soluzione innovativa è adattabile anche agli altri campi di applicazione dell’azienda, in particolare alle macchine schiumatrici e ai sistemi automatizzati per la stesura di colle poliuretaniche. I principali punti di forza del progetto CAM-robot, infatti, sono la flessibilità e la replicabilità della soluzione.
Contattaci per eventuali domande o chiarimenti: verrai subito ricontattato da un membro del nostro team!
Condividi l'articolo:
CAM-robot
Chimico
Italia, Veneto
2022
Scopri altri progetti simili




Perché alcuni Case Studies sono anonimi?
Nel rispetto della natura personalizzata dei nostri progetti di Automazione, molti Use Cases sono “no-brand”. Crediamo che la trasparenza sia fondamentale, ma allo stesso tempo teniamo in considerazione la sensibilità delle informazioni e il desiderio di riservatezza espresso dai nostri clienti.
Anche se non possiamo sempre divulgare nomi o dettagli specifici, ci impegniamo a condividere le storie di successo dei nostri progetti in modo anonimo. Attraverso questi esempi, illustriamo le sfide affrontate, le soluzioni sviluppate e i risultati tangibili ottenuti in diversi settori industriali.



