






La nascita degli AMR
Poiché sempre più piccole e medie imprese adottano soluzioni di automazione, assistiamo allo sviluppo di sistemi robotici sempre più flessibili, che sostituiscono progressivamente la tecnologia tradizionale dei veicoli AGV.
Pur operando in contesti produttivi diversi, con infrastrutture e risorse differenti, le esigenze delle aziende sono spesso comuni: aumentare la produttività, ridurre gli errori, velocizzare i trasporti dei materiali e migliorare la sicurezza.
Per rispondere a questa domanda di flessibilità e personalizzazione nell’innovazione di processo, oggi le aziende si orientano verso soluzioni AMR sempre più integrate e su misura. Sistemi come HELKO rappresentano proprio questa evoluzione: robot mobili progettati per adattarsi ai processi specifici dell’azienda, grazie a software avanzati e a un’elevata capacità di integrazione.
Il cuore dell’AMR: il software di navigazione e gestione di flotta
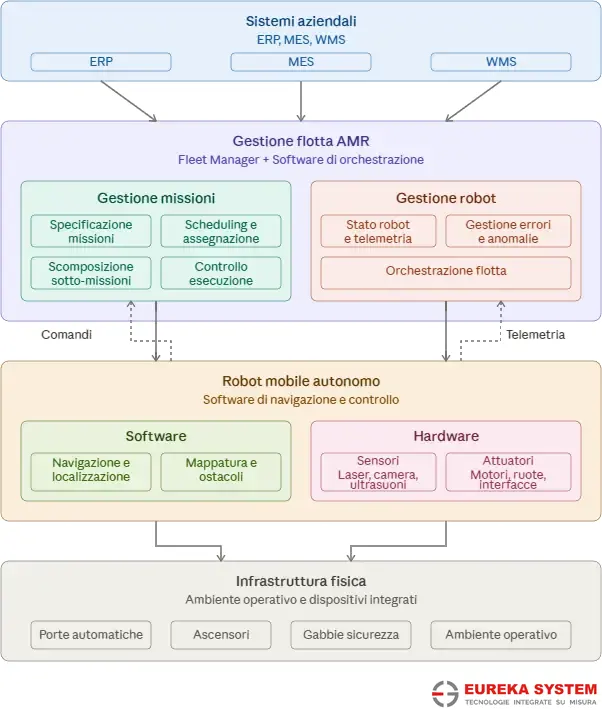
I robot mobili sono sistemi complessi che integrano hardware, software e componenti specializzati. In generale, gli AMR sono classificati in base alle loro capacità di navigazione, di localizzazione e di pianificazione dei percorsi. In definitiva, questo ne definisce l’autonomia. Ma c’è molto di più dietro gli AMR. Il vero cuore di un AMR è il software, che consente al robot di sapere dove si trova, di muoversi in sicurezza e di gestire l’interazione con l’ambiente e con le persone.
Tipicamente gli AMR funzionano a “missioni”: ogni compito di movimentazione e trasporto affidato loro viene gestito dal gestore di flotta come una missione di lavoro. Intuitivamente, potremmo semplificare una missione-tipo nelle seguenti fasi:
- Scomposizione missione in sotto-missioni
- Invio sotto-missioni ai controllori
- Controllo esecuzione
- Gestione dello stato del robot
- Gestione anomalie
È proprio qui che emergono le differenze tra le soluzioni standard e i sistemi avanzati. Su piattaforme come HELKO, ad esempio, il software non si limita alla navigazione, ma gestisce l’intera orchestrazione della flotta, ottimizzando l’assegnazione delle missioni, le priorità e l’utilizzo delle risorse.
Funzioni relative alle missioni:
- Specificazione missioni
- Gestione missioni assegnate
- Scheduling delle missioni
- Assegnazione ottimale delle missioni
Funzioni relative ai robot:
- Stato dei robot
- Visualizzazione errori
- Visualizzazione missione in corso
- Orchestrazione dei robot
Affinché tutto ciò sia possibile, il robot deve essere dotato di sensori quali telecamere, laser e ultrasuoni, i cui dati vengono elaborati in tempo reale.
Quali sono i principali elementi fisici di un AMR
Dal punto di vista hardware, un robot mobile autonomo si basa su due elementi fondamentali: sensori e attuatori.
SENSORI
Percepiscono l’ambiente garantendo due delle funzionalità di base degli AMR: la localizzazione e il rilevamento degli ostacoli. Per localizzarsi, i robot costruiscono una mappa dell’ambiente tramite i sensori a bordo. La mappa realizzata da un robot può essere resa disponibile a tutti i robot di una data installazione e rimane valida finché non si verificano forti cambiamenti ambientali. Per eseguire le missioni, i robot si localizzano sulla mappa calcolando stime probabilistiche della posizione, basate sulle letture dei sensori e sulle previsioni di posizione del robot. Inoltre, gli AMR utilizzano le informazioni provenienti dai sensori per individuare ostacoli improvvisi (persone o oggetti) lungo il loro percorso.
ATTUATORI
Sono gli elementi responsabili del movimento e dell’interazione fisica con l’ambiente, ad esempio, gli organi di moto e le ruote. Esistono molti fornitori di queste parti hardware e, di norma, le aziende AMR non producono tali componenti in-house.
Nel caso di soluzioni come HELKO, un elemento distintivo è la modularità; per questo HELKO associa il nostro software a una componentistica hardware industriale facilmente reperibile sul mercato. Questo approccio permette, da un lato, di sostituire ogni elemento hardware con componenti e parti alternative che garantiscono all’AMR le stesse prestazioni; dall’altro, di proporre un AMR personalizzabile su misura anche dal punto di vista hardware.
Quando l’integrazione fa la differenza
Un sistema AMR non può essere considerato isolatamente. Il vero valore emerge quando viene integrato nell’ecosistema aziendale.
Come qualsiasi altra automazione presente in azienda, anche gli AMR devono dialogare sia con i sistemi di livello superiore, come MES, WMS o ERP, sia con il campo, ossia con dispositivi, sensori, porte automatiche e infrastrutture fisiche. A una flotta AMR è necessario indicare cosa fare in qualsiasi momento: gli ordini e le relative missioni di movimentazione dei robot mobili possono cambiare a causa dell’evoluzione delle esigenze, e il modo ottimale di eseguire l’attività può variare in base alle mutevoli condizioni ambientali.
Si prendano, ad esempio, i software di gestione della flotta o di navigazione: questi richiedono interoperabilità, capacità decisionali locali o centrali e determinati livelli di interfacciamento con altri sistemi, come porte, ascensori, gabbie di sicurezza, ecc. In questo contesto, la capacità di integrazione diventa un fattore critico. Sistemi avanzati come HELKO sono progettati per essere interoperabili, consentendo una gestione fluida delle missioni in base alle esigenze produttive e alle condizioni operative.
A loro volta, gli AMR devono raccogliere e trasmettere dati: lo stato del robot, la posizione, il livello di carica, gli allarmi e le telemetrie. Queste informazioni sono fondamentali per il monitoraggio e l’ottimizzazione delle operazioni.
Altri software operativi che dovrebbero essere presenti in un sistema AMR e che necessitano comunque di un certo livello di integrazione sono gli strumenti di monitoraggio e gli IoT/IIoT (nel caso di HELKO, ad esempio, potremmo citare il software Fleet Lookout). Pertanto, nell’affrontare una soluzione di robotica mobile è fondamentale comprendere anche la connettività e la telemetria necessarie tra i nuovi AMR e l’infrastruttura esistente.
Qualche consiglio per la scelta dell’AMR
La scelta di un sistema AMR deve partire da una chiara comprensione del processo da automatizzare. Non si tratta semplicemente di scegliere un robot, ma di progettare una soluzione. È necessario valutare l’ambiente, i flussi, le interazioni con gli operatori e le prospettive di crescita futura.
Sii chiaro su ciò di cui hai bisogno e scegli in base alla funzionalità esatta, alle specifiche ambientali e ai requisiti di sicurezza della tua soluzione. Controlla i carichi utili, le velocità massime, i pavimenti e gli ambienti di lavoro, la durata della batteria e così via.
Quindi come scegliere?
Il requisito principale è identificare chiaramente il processo da automatizzare. Il robot lavorerà con altre persone? Ci sono aree designate per l’AMR? L’ambiente di lavoro consente ai robot di disporre di riferimenti fissi per individuare facilmente la propria posizione? Bisogna gestire una flotta? Queste sono solo alcune delle domande che ci si deve porre.
Successivamente, è necessario creare un elenco dei requisiti, seguito da un elenco delle attività da svolgere nel processo di integrazione dell’AMR.
In ogni caso, un sistema AMR efficace deve essere in grado di evolvere nel tempo. La possibilità di espandere la flotta, adattare i percorsi e integrare nuovi sistemi è fondamentale. Sapere che la tua soluzione AMR potrà crescere con la tua azienda, integrarsi con nuove macchine e software di terze parti o con il tuo codice, ti darà lo spazio per crescere.
L’automazione non è un processo semplice; noi di Eureka lo sappiamo bene. Richiede una pianificazione approfondita e una profonda comprensione dei processi in atto in ciascuna azienda. Dall’hardware al software, dalla funzionalità al funzionamento, un AMR è molto più che i soli algoritmi di navigazione, e l’obiettivo di questo articolo è proprio mettere in luce la complessità di questa tecnologia.
In questo senso, soluzioni come HELKO sono progettate proprio per crescere insieme all’azienda, adattandosi a nuovi scenari produttivi senza richiedere interventi strutturali invasivi.



