475 nt
stazza
60 m
lunghezza
16 m
larghezza
5 m
altezza
1600 t
portata
10 kn
velocità
33 m
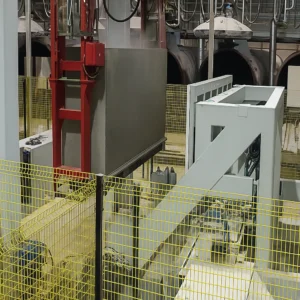
gru escavatore
8 m
gru di servizio
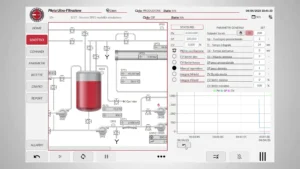
postazioni di comando con 24 joystick analogici
0
inverter per comando e controllo di argani e salpapalo e bow-thrusters
0
controlli relativi al tiro e alla lunghezza delle funi
0
nodi POINT I/O e FLEX I/O
0