



Nata nel 2004 come System Integrator, oggi Eureka System si dedica allo sviluppo di soluzioni di automazione su misura.
Anni di sviluppo di software industriale e di progetti di automazione e robotica, ci hanno portato ad acquisire competenze tecniche specifiche in molti ambiti e tecnologie, così da poter ideare sviluppare e integrare soluzioni su misura destinate ai più diversi processi produttivi.

In Eureka System sviluppiamo soluzioni su misura che nascono sempre dal software e comprendono spesso anche il design, la meccanica, e l’elettronica.
Dall’analisi tecnica, allo sviluppo software, alla messa in servizio dell’automazione: ogni progetto viene seguito con un metodo di lavoro ben consolidato.
Software e soluzioni personalizzate, affidabili e innovative, sviluppate su misura con un metodo di lavoro ben consolidato.
Scopri tutte le potenzialità dei nostri software:

La nostra storia è la nostra esperienza, costruita negli anni sviluppando progetti di automazione per i più diversi settori industriali.
Nel corso degli anni, Eureka System ha ampliato la propria offerta in termini di soluzioni, servizi, e tecnologie utilizzate e integrate. Questo ci ha permesso di sviluppare internamente una vasta esperienza settoriale e multidisciplinare.

Espressione concreta delle competenze tecniche di Eureka System, AgiLAB è allo stesso tempo una showroom e un laboratorio interattivo robocentrico dedicato allo Smart Manufacturing.
Sviluppata per emulare in modo agile un processo produttivo ottimizzato in ottica 4.0, AgiLAB dimostra concretamente il ruolo del software nell’innovazione di processo.
Il committente di questo progetto di automazione speciale è un’azienda italiana che produce su misura cucine di design in pietra e marmo.
Come si possono automatizzare i processi di Pick & Place, di presa, carico e scarico di pezzi di marmo dalle dimensioni sempre diverse?
L’azienda aveva la necessità di automatizzare le azioni di Pick & Place di un robot cartesiano, utilizzato per afferrare varie lastre di marmo e trasferirle dal magazzino a un’etichettatrice, dall’etichettatrice a un pianale per il taglio su misura, e infine dalla zona di taglio a un ulteriore pianale vuoto per lo scarico del pezzo.
Le difficoltà erano sorte nell’automatizzare il processo di Pick & Place, principalmente per via dell’aspetto custom dei mobili prodotti, e dunque delle misure sempre diverse delle lastre di marmo necessarie.
Le premesse:
La soluzione ideata da Eureka System prende il nome di PM Manager e integra al suo interno un core matematico che abbiamo chiamato PM Core. PM Manager è un applicativo che raccoglie, interpreta e computa i dati di tre diverse fonti, al fine di dirigere le azioni di pick & place del manipolatore robotico cartesiano:
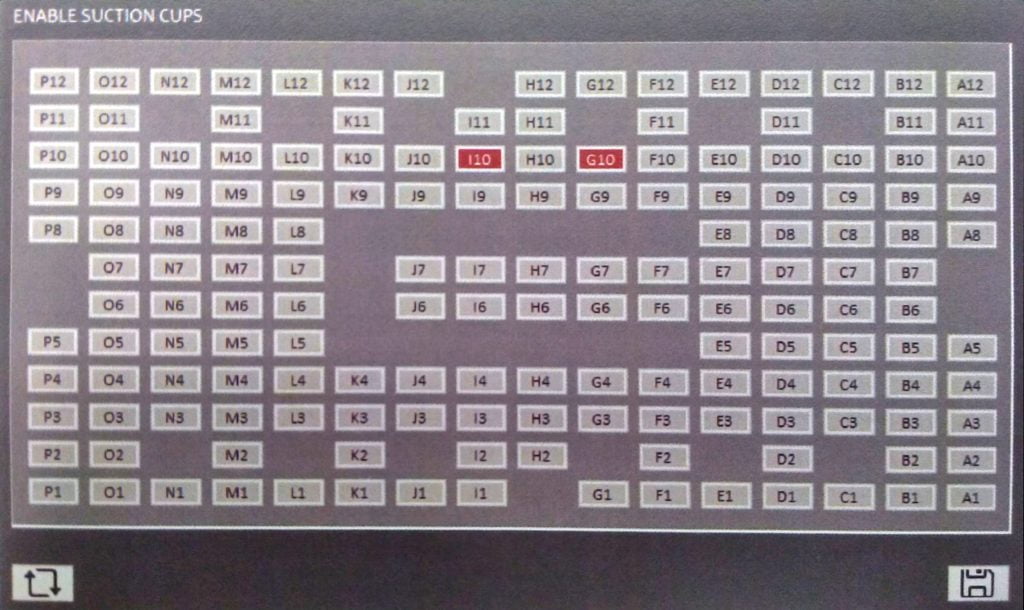
Per manipolare i pezzi di marmo, il robot cartesiano è dotato di una testa di presa con ben 192 ventose. La soluzione sviluppata da Eureka System è in grado di calcolare automaticamente anche quante e quali ventose attivare per eseguire al meglio le movimentazioni richieste.
Il PM Manager comunica con i tre attori e rielabora le informazioni ricevute, per poi metterle a disposizione del PM Core, il cuore matematico vero e proprio dell’applicativo. Il Core ha il compito di verificare la fattibilità delle operazioni di prelievo e di deposito della lastra o del pezzo di marmo. A questo punto procede a calcolare automaticamente le quote X, Y, la rotazione R e la matrice di attuazione ventose in aspirazione o soffio da applicare alla testa di presa del cartesiano. L’applicativo, poi, gestisce e reinterpreta i dati durante le fasi di movimentazione.

L’interfaccia utente fornisce contributi visivi significativi, utili a comprendere e analizzare le movimentazioni del sistema cartesiano. Grazie a una studiata interfaccia grafica, nell’HMI è possibile visualizzare informazioni, come ad esempio:
Inoltre, per il calcolo delle quote e della matrice di attuazione delle ventose sono disponibili due modalità: 100% automatica oppure semi-automatica (scelta manuale del pezzo da movimentare, posizionamento della mano di presa e delle ventose, determinabili da un operatore), utili, ad esempio, per ovviare a guasti o rotture di una o più ventose.
Contattaci per eventuali domande o chiarimenti: verrai subito ricontattato da un membro del nostro team!
Condividi l'articolo:
Middleware industriale
Marmo, Arredamento
Italia
2019
Scopri altri progetti simili




Perché alcuni Case Studies sono anonimi?
Nel rispetto della natura personalizzata dei nostri progetti di Automazione, molti Use Cases sono “no-brand”. Crediamo che la trasparenza sia fondamentale, ma allo stesso tempo teniamo in considerazione la sensibilità delle informazioni e il desiderio di riservatezza espresso dai nostri clienti.
Anche se non possiamo sempre divulgare nomi o dettagli specifici, ci impegniamo a condividere le storie di successo dei nostri progetti in modo anonimo. Attraverso questi esempi, illustriamo le sfide affrontate, le soluzioni sviluppate e i risultati tangibili ottenuti in diversi settori industriali.




